
자동 로봇을 이용한 선택적 아스프라거스 수확
AvL 모션은 터크의 RFID 및 필드버스 기술, 고정밀 센서를 사용하여 흰색 아스파라거스의 선택적 수확을 위한 장비로 농기계의 새로운 시대를 열었습니다
네덜란드의 스타트업 기업인 AvL 모션은 흰색 아스파라거스의 완전 자율 선택적 수확을 위한 기계를 시장에 내놓았습니다. 높이 제어를 위한 초음파 센서로 터크의 IO-Link 통신 RU40U를 적용했습니다. 후속 협업을 통해 소형 유도형 근접 스위치, 정밀 엔코더, 배너 엔지니어링의 LE550 레이저 센서 및 Li500-Q25 선형 위치 센서를 포함하여 더 많은 센서 기술이 차량에 적용되었습니다. AvL은 또한 수확 모듈을 식별하기 위해 TN-Q14 RFID 읽기/쓰기 헤드를 사용하는 한편 TBEN-S2-4IOL 컴팩트 I/O 모듈은 IO-Link 신호를 PLC로 전송합니다.
-turck-image.jpg)
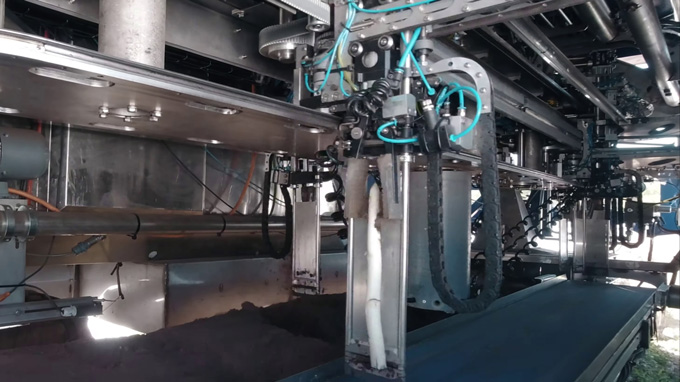
AvL 컴팩트 S1560은 토양에서 아스파라거스를 자동으로 끌어옵니다

6 ~ 12개의 수확 모듈이 기계에 부착되어 있습니다

AvL 설계자 Arno van Lankveld 는 터크의 IO-Link 초음파 센서 RU40U를 선택했습니다

견고한 디자인의 Li500-Q25 센서는 전면 액슬 위헤 장착할 수 있습니다

버퍼 영역의 BI3-M08K 미니어처 센서는 수확 카세트의 수를 감지합니다
카세트가 NI10U-M12를 통화가면 PLC는 수확 작업을 위해 타이머를 시작합니다

터크 엔코더는 현재 수확 모듈이 사용 가능한 버퍼 위치를 출력합니다

운전자 플랫폼에서 작업자가 아스파라거스를 상자에 포장하고 수확기를 제어합니다

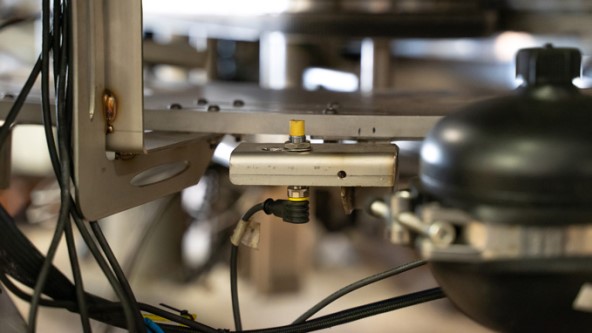
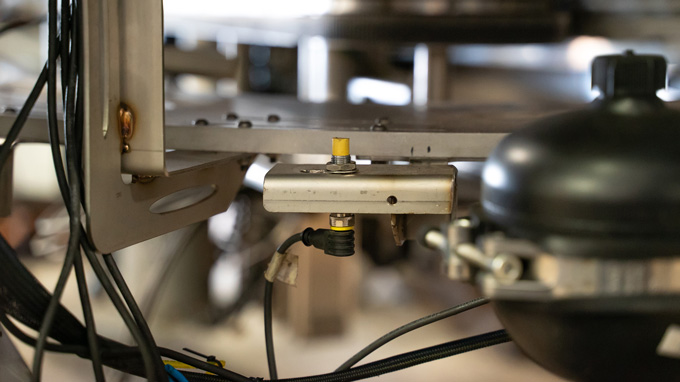
TBEN-S2-4IOL 멀티프로토콜 장치는 센서와 PLC 간의 인터페이스로 사용됩니다
-turck-thumbnail.jpg)








.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
IO-Link 통신의 초음파 센서를 통한 높이 제어
AvL 모션은 IO-Link가 장착된 2개의 초음파 센서 RU40U를 사용하여 아스파라거스 베드와 공압 제어식 기계 내부 프레임 사이의 거리를 측정합니다. 먼지가 많거나 빗물이 뿌려진 심토에서도 센서가 높이를 안정적으로 측정할 수 있으므로 사용자가 HMI에서 설정이 가능합니다. “터크의 뛰어난 제품 품질과 빠른 배송에 깊은 인상을 받았습니다." AvL CEO Arno van Lankveld가 전했습니다.
숙련된 작업자 눈을 대체하는 광학 프로세스
AvL 컴팩트 S1560의 수확 과정은 매우 역동적입니다. 기계를 배치하고 움직이면 토양 표면이 스캔됩니다. 아스파라거스 팁의 정확한 위치는 추가 광학 프로세스와 함께 레이저 센서를 사용하여 메인 컨트롤러에 의해 감지됩니다. 로봇 내부의 원형 트랙 주위에서 여러 개의 수확 모듈이 공정에서 움직입니다. 현재, 이는 약 25 cm 높이의 카세트 중 12개로 구성됩니다. 로봇의 속도에 맞게 조정되며 삽입, 절단 및 파지의 전체 프로세스를 제어합니다.
대상과 수확 모듈 사이의 미세 조정
컨트롤러는 수확 과정을 미세 조정하기 위해 선택된 아스파라거스 스피어의 좌표뿐만 아니라 모듈의 위치 및 이동에 대한 정보의 지속적인 흐름이 필요합니다. 버퍼에 현재 위치한 카세트 수, 즉 파크 위치에 있는 카세트 수, 현재 회로에서 아스파라거스 슈트를 감지하는 카세트에 대한 쿼리로 시작합니다. 이를 위해 AvL은 소형 BI3-M08K 유도형 센서를 사용합니다. 수확 모듈의 정확한 식별은 각 카세트의 개별 코드를 읽는 TN-Q14 HF 읽기/쓰기 헤드를 사용하여 RFID로 구현됩니다. 여기에는 로터리 엔코더가 제공하는 위치 감지 기능이 추가됩니다.
유도형 센서로 타이머 작동
수확기가 회로를 시작하면 NI10U-M12 근접 스위치를 통과하여 PLC에서 수확 프로세스를 위한 타이머의 실행을 설정합니다. 아스파라거스 스피어는 깔끔한 라인으로 자라지 않기 때문에, 수확 모듈은 원형 트랙 주위의 움직임 외에도 왼쪽이나 오른쪽으로 움직일 수 있습니다. 이것은 압축 공기로 구동되므로 항상 수십 분의 1초 지연됩니다. 카세트의 올바른 정렬을 보장하기 위해 PLC는 터크의 글로벌 파트너 배너 엔지니어링의 LE550 레이저 센서로 측정한 모듈의 초기 위치와 목표 위치 사이의 거리에 대한 정보를 얻습니다.
조이스틱으로 회전 조작
작업자는 외부 제어 모듈을 사용하여 수확기의 속도 및 유압식 조향을 제어합니다. 2개의 터크 엔코더가 휠 회전을 측정합니다. AvL은 유도 선형 위치 센서를 사용하여 휠 위치를 측정합니다. 이를 위해 LI500-Q25 센서의 위치 결정 요소는 조향 실린더의 피스톤과 연결됩니다. 이러한 방식으로 메인 컨트롤러는 하나의 값만 사용하여 두 바퀴의 각도를 계산하며 운전자는 조이스틱으로 기계를 쉽게 돌릴 수 있습니다. 경쟁사에서 제공하는 모델과 달리 농부는 AvL 컴팩트 S1560을 트랙터에 부착하지 않아도 됩니다.
자료
- 비디오 (유튜브): 와전 자율 화이트 아스파라거스 수확 로봇
- 한 눈에 보기: 수많은 산업용 어플리케이션을 위한 엔코더 포트폴리오
- 제품 바로보기 - 초음파 센서 RU40U-M18E-LIU2PN8X2T-H1151
- 제품 바로보기 - 유도형 센서 BI3-M08K-AP6X-V1131
- 제품 바로보기 - 유도형 센서 NI10U-M12-AP6X-H1141
- 제품 바로보기 - 유도형 리니어 포지션 센서 LI500P0-Q25LM0-LIU5X3-H1151
- 제품 바로보기 - 레이저 센서 LE550IQ
- 제품 바로보기 - IO-Link 통신의 레이저 센서 LE550KQ
- 제품 바로보기 - HF-RFID 읽기/쓰기 헤드 TN-Q14-0.15-RS4.47T
- 제품 바로보기 - 컴팩트 멀티프로토콜 I/O 모듈 TBEN-S2-4IOL
- 전체 기사 다운로드 – more12050e [PDF, 1,31 MB]
- 자동차
- 필터 생산의 모듈식 유연성 및 안전성
- 전류 모니터링이 통합된 케이블로 운반 시스템의 원치 않는 종료를 방지
- 정확한 재료 공급을 보장하는 유도형 커플러
- MES 직접 연결을 통한 어셈블리 관리
- 자동차 생산 시 차체 감지
- 자동차 생산에서 안정적인 스키드 감지
- 범퍼 생산 시 오류 없는 JIS 오더 피킹
- 레이저 센서를 활용한 배터리 생산 공정의 반짝이는 판금 실린더 감지
- RFID 버스 모드로 리튬 이온 배터리 품질 보장
- 딥 코팅 라인의 레벨 측정
- 중앙 윤활 시스템의 레벨 제어
- 접착 로봇에 대한 품질 보증
- 빠른 플랫폼 정렬을 도와주는 틸트 각도 센서
- 상태 모니터링을 통한 모터 제어
- IP67 하이브리드 모듈로 안전 신호 처리
- 냉각 스테이션의 분산 모니터링
- 이더넷 네트워크로 연결된 로봇 용접 셀
- 용접 클램프 냉각 회로 모니터링
- 드럼 워셔의 유량 모니터링
- 판금 두께 측정
- 개조형 모터 상태 모니터링
- 클라우드 기반 레벨 모니터링
- 프레스 - 툴 식별
- 차체 - 용접너트 감지
- 도장 - 스키드 식별
- 의장 - 로봇 조립
- 파워트레인 - 비접촉 구동
- 로봇 셀 영역 보호
- UHF RFID를 통한 품목 수준 식별
- 냉각 윤활유 공급 모니터링
- 프레스 설비의 유압 제어
- 시저 리프트의 프로세스 압력 측정
- 차체 - 자동차 용접 팁 검사
- 차체 - 수동 적재 용접 셀
- 최종조립 - 검은색 부품 감지
- 최종조립 - 선루프 투명 유리 감지
- 최종조립 - 원거리에서 검사
- 파워트레인- 엔진 블록의 고무 와셔 감지
- 엔진 블록 부품 위치 감지
- 전기 자동차 감지
- 셀프 세차장에서의 차량 감지
- 적용사례
- 스테이터 생산에서 데이터 수집을 위한 RFID 솔루션
- 유연하고 효율적인 생산을 위한 모듈식 공장
- 레이저 센서로 조립 셀 검은색 범퍼를 감지
- 모듈식 생산을 위한 분산 안전 기술
- 모듈러 컨베이어 시스템
- 안전한 툴체인지를 위한 RFID 및 I/O 모듈 솔루션
- 서스펜션 생산에서 RFID 가이드 AGV
- IO-Link를 통한 소음기 생산라인 연결
- 뒷좌석 통풍구 생산라인의 작업 캐리어 식별
- 용접너트 감지
- RFID를 통한 추적
- 엔진 생산에서의 RFID
- 식별솔루션을 통한 범퍼 생산
- 도장 공정 솔루션
- 용접 및 조립 센서
- 조립시스템에 적용된 비접촉식 각도센서
- 툴 식별
- 픽-투-라이트를 통한 효율성 향상
- 인젝터 노즐의 RFID 식별
- 차체 공정에서의 RFID
- IO-Link를 통한 차동기어 생산
- 화학
- 에너지
- 식음료
- RFID 트래킹을 바탕으로 아이스크림 생산에서 음식물 쓰레기 감소
- 상태 모니터링 센서를 사용한 기후 제어 자동화
- 제어 캐비닛의 상태 모니터링
- 저장 창고 내에서 상태 모니터링
- 롤링 머신의 도우 두께제어
- 푸드 컨테이너 식별
- 비전센서 활용한 푸드 컨테이너 확인
- 터미널 챔버로 센서 빠른 교체
- 파이프 엘보 감지 솔루션
- 초콜릿 몰딩 식별
- 적용사례
- 증기 발생기의 클라우드 기반 유지 관리
- RFID를 바탕으로 식품 생산의 트랙 앤 트레이스 가능
- 22종 폭발 위험 구역에서 신뢰할 수 있는 리니어 위치 감지
- 냉장실의 분산 제어 모듈
- RFID를 이용한 도축장 내 육류 생산 공정 추적
- 감자의 가공공정에 사용된 비접촉식 엔코더
- 식품 유통센터에 적용된 UHF RFID
- RFID를 활용한 초콜릿 생산 공정
- 식품 장비를 위한 분산 I/O
- 증류주 공장에 사용된 리모트 I/O
- RFID와 오토 클레이브
- 초콜릿 제조과정의 투명한 트래킹
- 컨베이어용 IP67 파워 서플라이
- 식품 자재창고 식별 솔루션
- 카메라를 이용한 병 감지
- 물류
- 컨베이어 벨트의 상품 식별을 위한 UHF RFID 터널
- 물류센터에서 패키지 걸림 방지
- 자율 지게차의 높이 제어 및 3D 공간 모니터링
- 컨베이어 모듈의 분산 제어
- RFID를 통한 빅백 추적
- 컨테이너 크레인의 거리 감지
- 보호 구역에 대한 접근 통제
- 전기에 민감한 보호 장비의 분산형 뮤팅
- I/O 블록으로 롤러 컨베이어 모듈 제어
- 컨테이너 확인
- 물류 창고에서의 신속한 태그 감지
- UHF RFID를 통한 품목 레벨 식별
- 컨베이어 벨트의 예지보전
- 운송 컨테이너 감지
- 패트병 내 액체 레벨 감지
- 냉동 컨테이너 식별
- 휴대용 단말기로 모바일 컨테이너 식별
- 푸드 컨테이너 식별
- 1차 벤더 - 범퍼 식별
- 저장 창고의 상태 모니터링
- 리치 스태커의 충돌 방지
- 적용 사례
- Efficient Order Picking with Pick-to-Light System
- 컨베이어 기술의 디지털화를 위한 효율적인 솔루션
- 물류: RFID를 통해 99%의 오류 할당량을 줄일 수 있습니다
- RFID: 3건의 배송 오류 방지 후 ROI 달성
- 센서 기반의 완벽한 솔루션을 통한 안정적인 AGV 제어
- 제한된 기동 영역에서 효율적인 트럭 네비게이션
- RFID를 바탕으로 한 지속 가능한 RTI 추적
- 오류 방지 자재 물류를 위한 RFID 솔루션
- HF 버스 모드의 RFID를 바탕으로 씨앗 저장에 용이
- 픽-투-라이트는 매뉴얼 로지스틱스를 60% 이상 가속화합니다
- 픽-투-라이트 솔루션으로 조립 프로세스 촉진
- 주요 빌딩 장소에서 무인 매장을 가능하게 하는 RFID
- I/O 및 세이프티 모듈로 내부물류 처리량 증가
- 원자재 배송 추적
- RFID 기반 출하 제어로 오류 최소화
- 인바운드 및 아웃바운드 자재의 RFID 기반 추적
- 분산형 UHF RFID 솔루션
- 감자의 가공공정에 사용된 비접촉식 엔코더
- 냉장실의 분산 제어 모듈
- QT50 레이더 센서를 활용한 지게차 속도제어 시스템
- IP67 등급의 컨베이어용 전원 공급 장치
- 모듈러 컨베이어 시스템
- 자재창고에 사용된 RFID 솔루션
- RFID를 활용한 서스펜션 생산 라인의 AGV 가이드
- 제약산업에서 RFID의 활용
- 식품 유통 센터의 UHF RFID
- 트럭 자율 주차 지원
- 운송 장비
- 콤바인 수확기의 동물 및 물체 감지
- 상태 모니터링 센서로 기후 제어 자동화
- 스프레이 붐의 자동 경사 보정
- 농약 살포기 분배 라인
- 살포 장비의 각도 측정
- 콤바인 내 곡물 흐름 모니터링
- 크레인 기둥 각도 위치 측정 솔루션
- 소방차 장비 수납부의 조명 설치 솔루션
- 콤바인 내 두 축의 기울기 측정
- 리치 스태커의 충돌 방지
- 적용사례
- 자동차 생산에서 스마트 지게차를 사용한 RFID 솔루션
- 관개 및 배수 펌프의 안전한 원격 유지보수
- RFID 시스템을 통한 출입 통제
- 선택적 아스파라거스 수확기
- RFID 및 엔코더를 활용한 위치 측정
- 레이더센서를 활용한 지게차 속도제어 시스템
- AGV 서스펜션 운송에서의 RFID 가이드
- 슈퍼 요트 리미트리스의 블록 I/O 모듈
- 호퍼 준설선의 마모없는 엔코더
- 분진 방지용 I/O 시스템
- 컨버터 캐비닛 공기 냉각 모니터링
- 퀵 디스커넥트 커넥티비티
- 극한의 추위에서의 자동화 솔루션
- 크레인용 리모트 I/O
- 견고한 중금속 리프팅
- 안전한 롤러코스터 라이딩
- 모바일 기계 솔루션
- 정확한 높이 측정
- 임계각 감지
- 공중 작업대 각도측정 솔루션
- 오일 및 가스
- 포장
- 제약
- RFID를 통한 종단 간 샘플 추적
- Ex 구역에서의 튜브 연결 RFID 제어
- 분산형 패키지 검증
- 이더넷 기반 모듈형 스키드 자동화
- 분산 I/O 기술이 적용된 제약 스키드
- 모듈형 공정 플랜트에서의 방폭
- 밸브 인터페이스 분산 제어
- 1/4 회전 액츄에이터 모니터링
- 파이프엘보 감지 솔루션
- 리모트 시그널 I/O
- 수퍼 스키드 생산계획 및 제작
- 필드 디바이스의 쉬운 커넥션
- 냉동 컨테이너 식별
- 이동식 컨테이너 식별 솔루션
- 핸드 헬드 장치로 모바일 컨테이너 식별
- 호스 연결 식별 솔루션
- 멸균 구역의 호스 연결 식별
- 1종 폭발 위험 구역에서 호스 연결 식별
- 빅백 및 바이오리액터 식별
- 일회용 어플리케이션의 식별
- 적용사례
- 반도체
Select Country
Turck worldwide